Robotic Masonry Project
2022
with Obinna Ekezie, Jenny Li, Natasha Louie,
Sam McMillan, Neve Toth
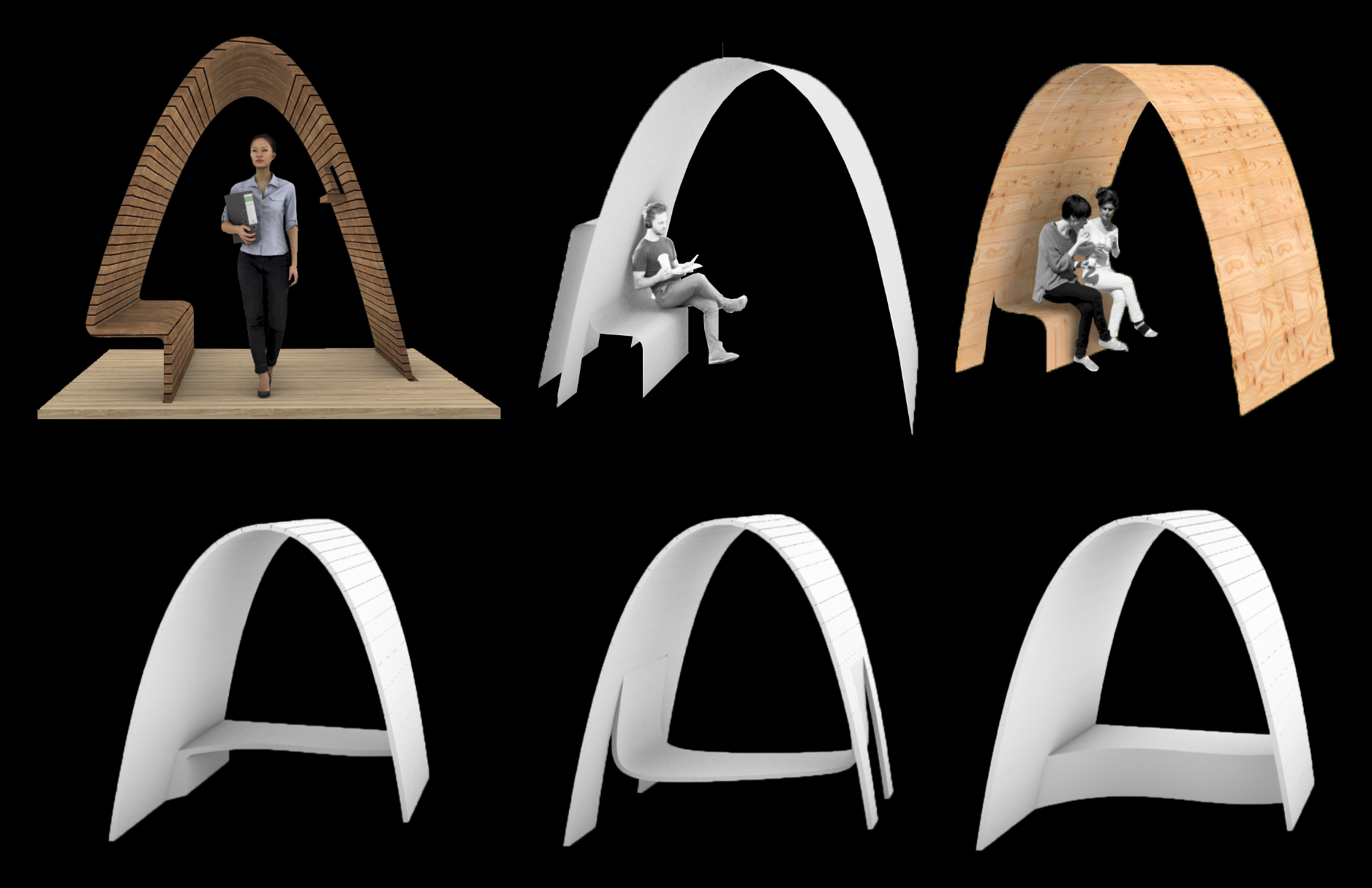
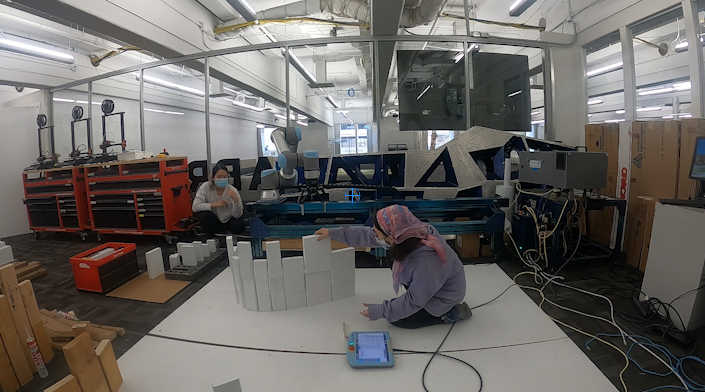
This project focused on the collaboration between human and robot to create a multifunctional, human-scale pod that can be deployed in a multitude of spaces. By using robots to place the bricks, more complex geometries can more easily be achieved than if humans are placing the bricks. This project sought to use a robot in combination with multiple brick sizes to better follow the curvature of catenary arches. Through human-robot interaction, this type of masonry can be more easily achieved than if humans were to attempt such a project alone.
While the implementation of the project was unsatisfactory—by constructing the arch on its side and in parts, the core concept remains a feasible avenue for including robotics in masonry projects.